This project was built independently for Design Nature. It centered around refining the design process through the lens of Bio-inspiration.
The project goal was to create a hopping device using a mechanism inspired by the function of a real hopping organism. The research and design process was thorough and continuously documented.
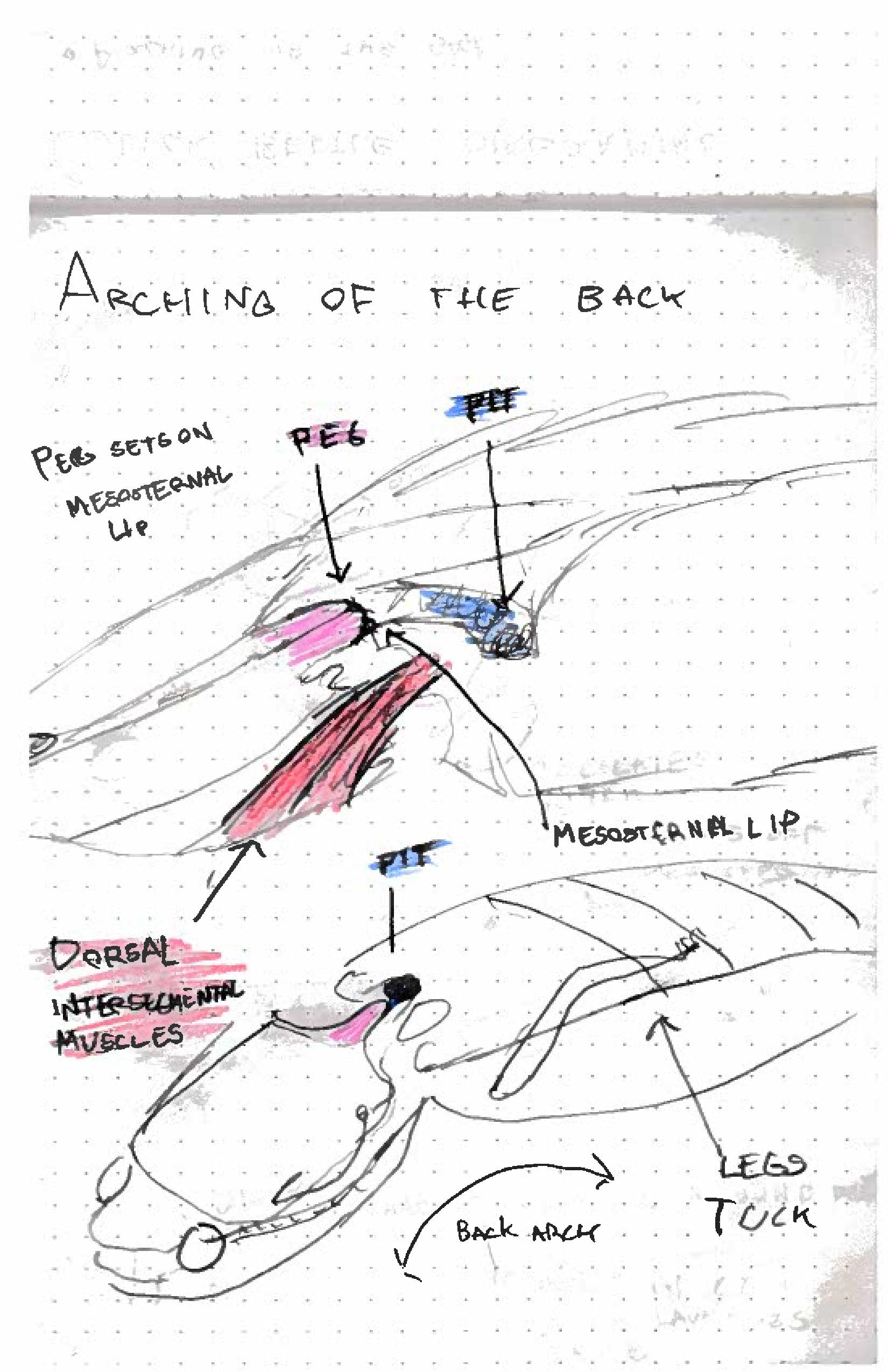
We started by sketching real hopping insects from our local Massachusetts wildlife, as well as reading research papers and reproducing anatomical diagrams of the click beetle.
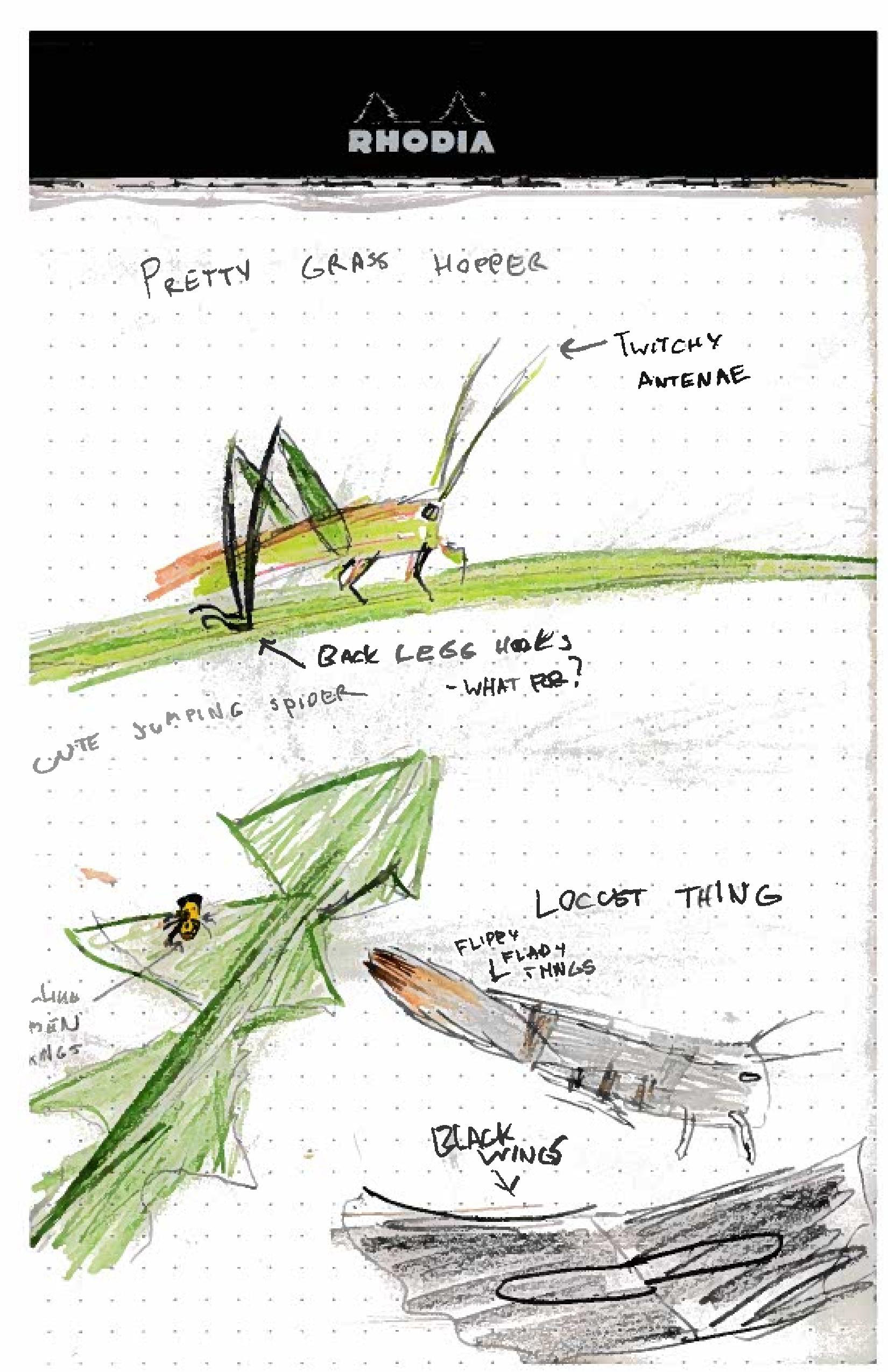
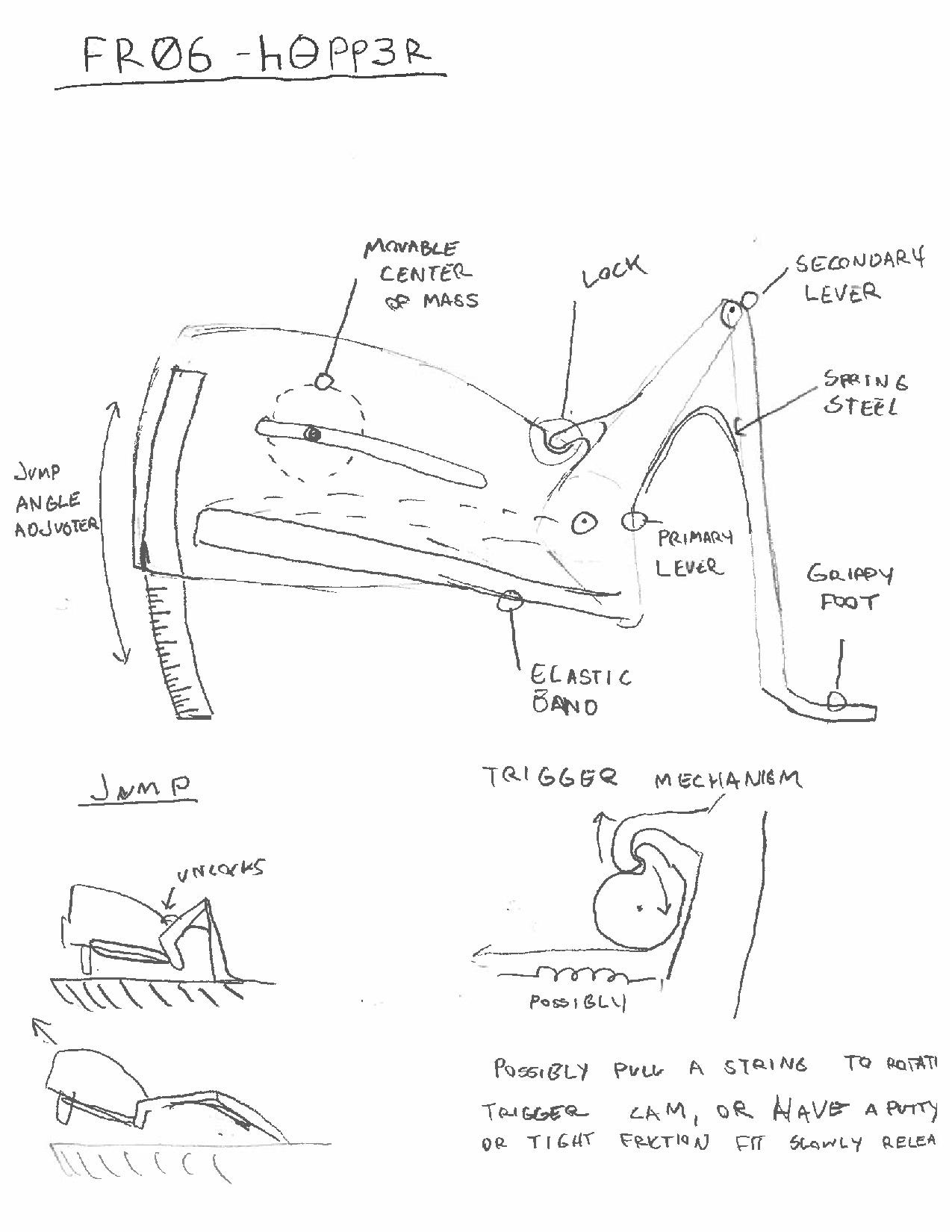
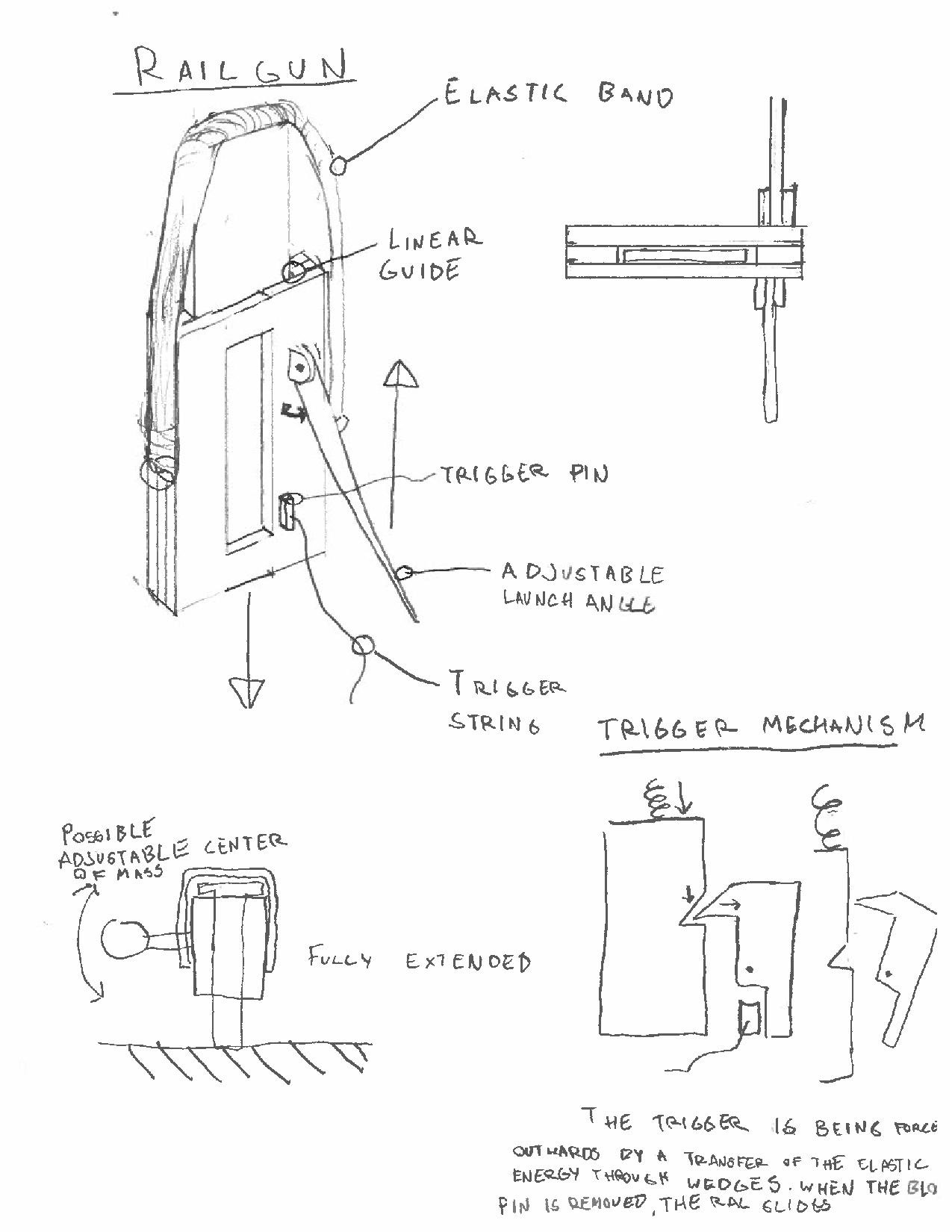
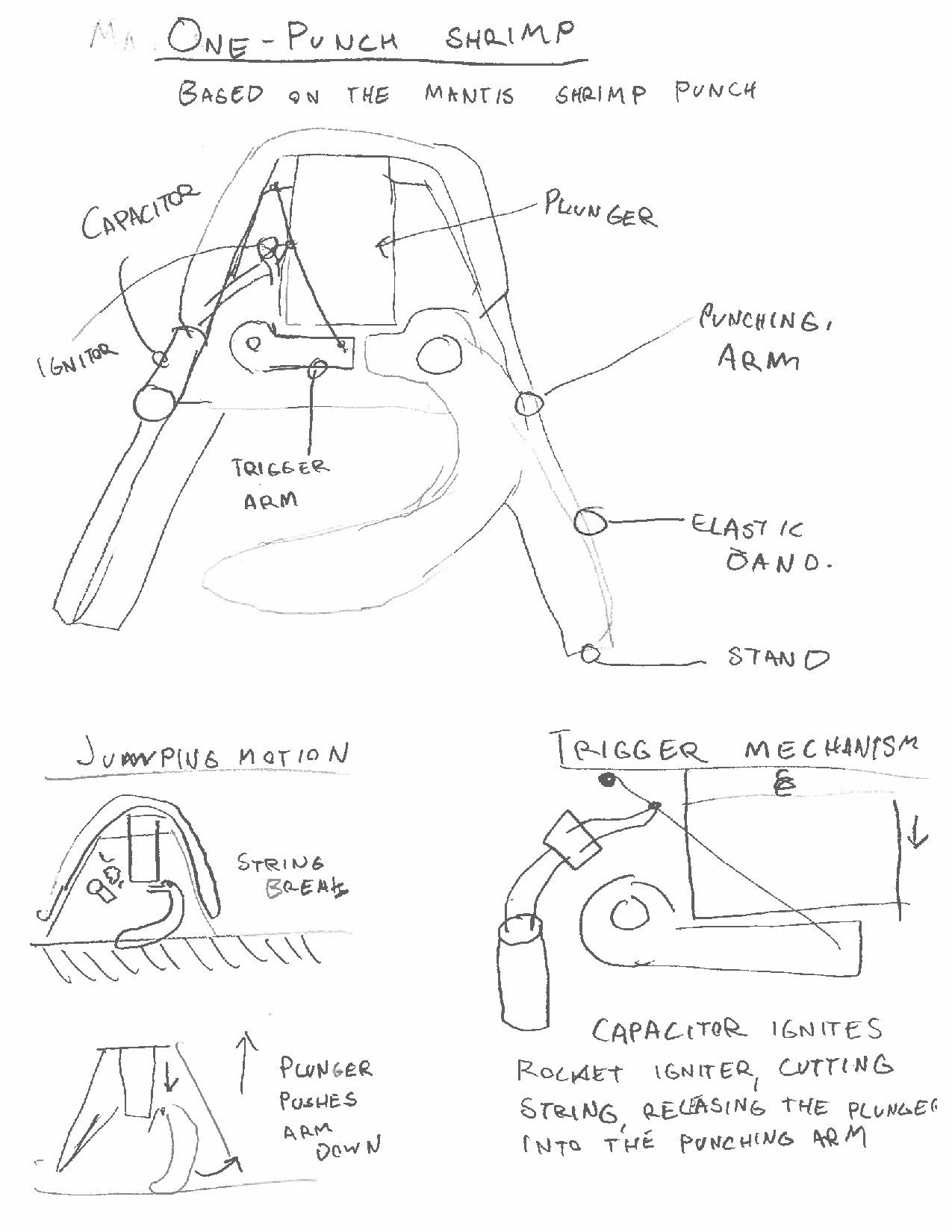
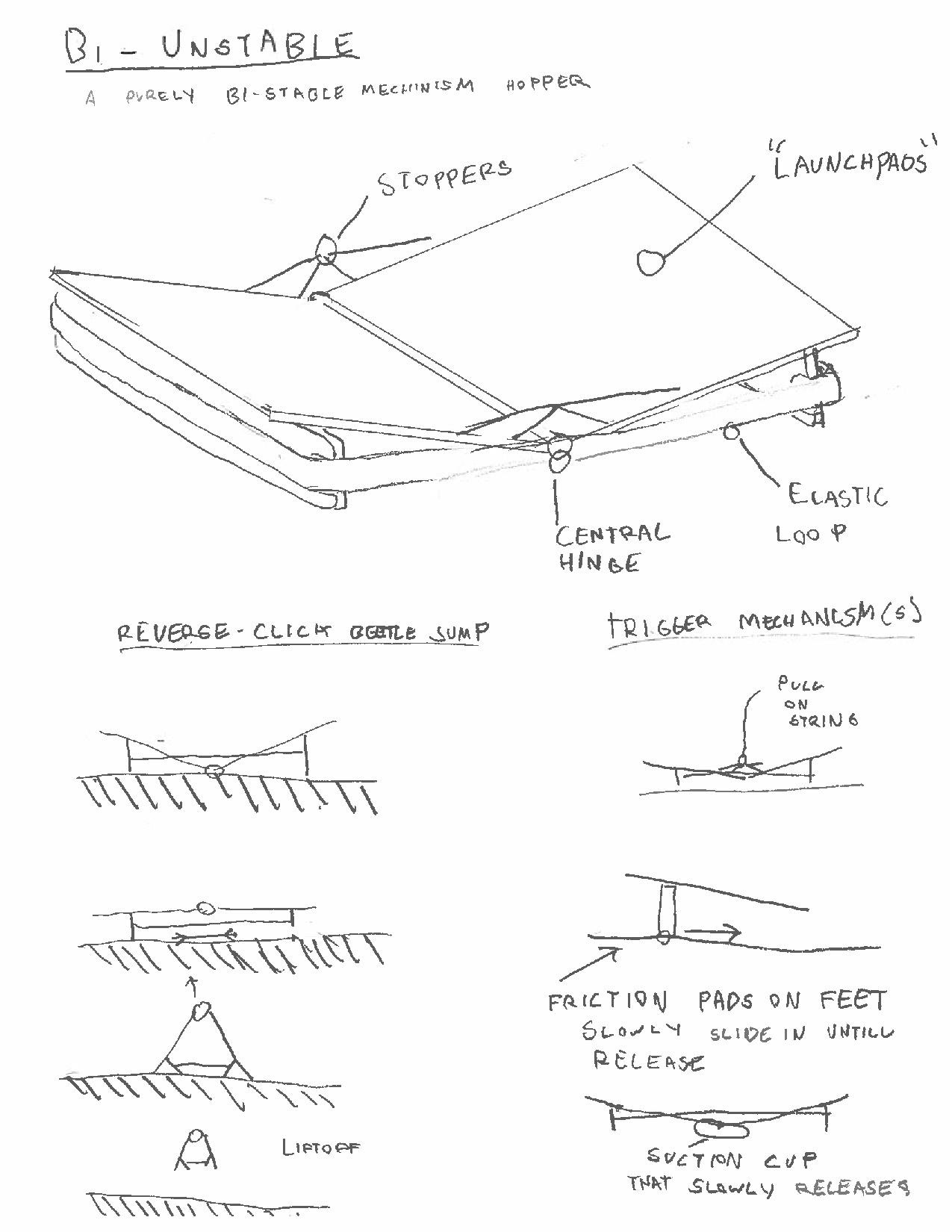
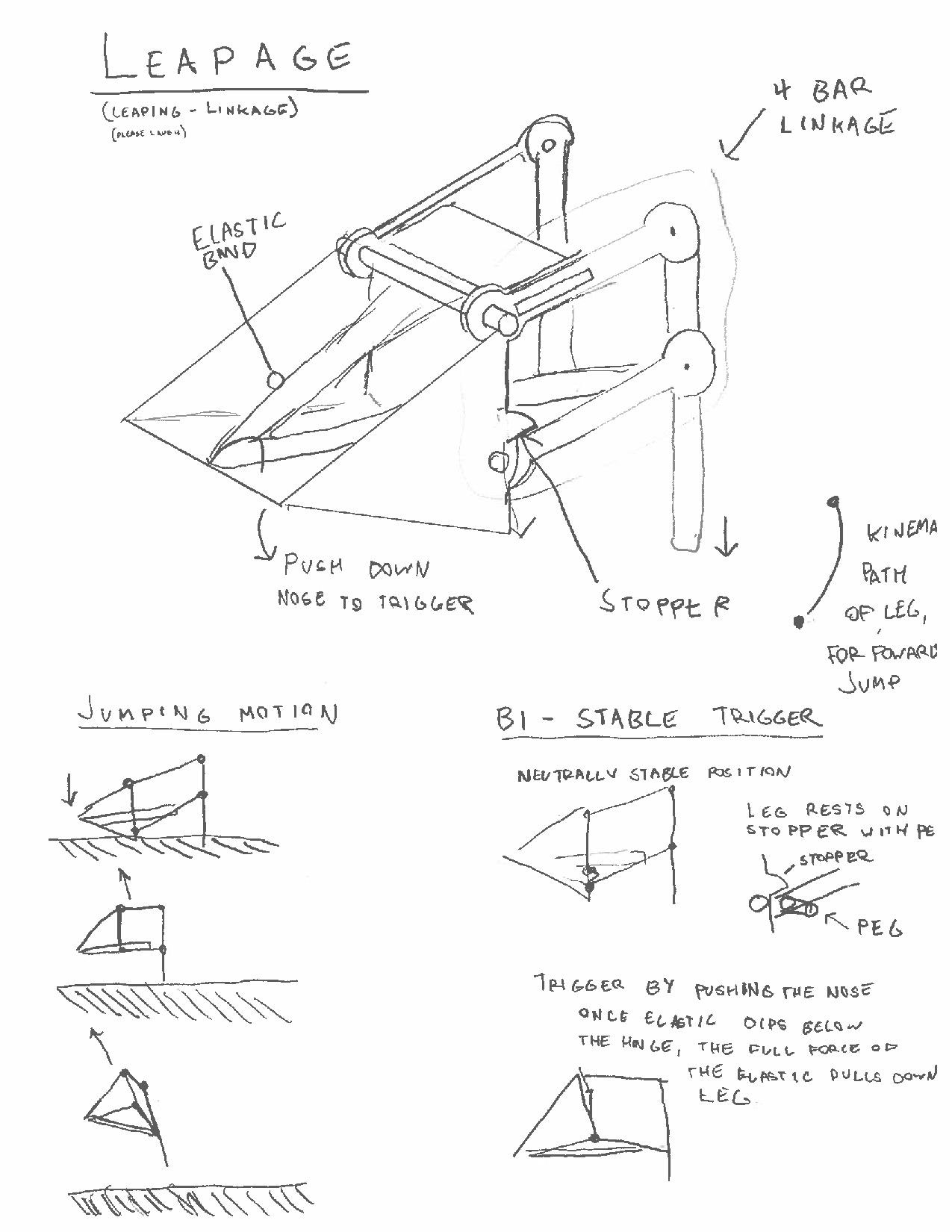
Using ideas about motion and stored energy from grasshoppers, fleas, click beetles, and even the mantis shrimp, I sketched 5 detailed thumbnails.
I made rough prototypes of my 2 favorite designs rendered in cardboard, tape, popsicle sticks, rubber bands, and straws. A lot of emphasis was placed on using easily recyclable prototyping materials

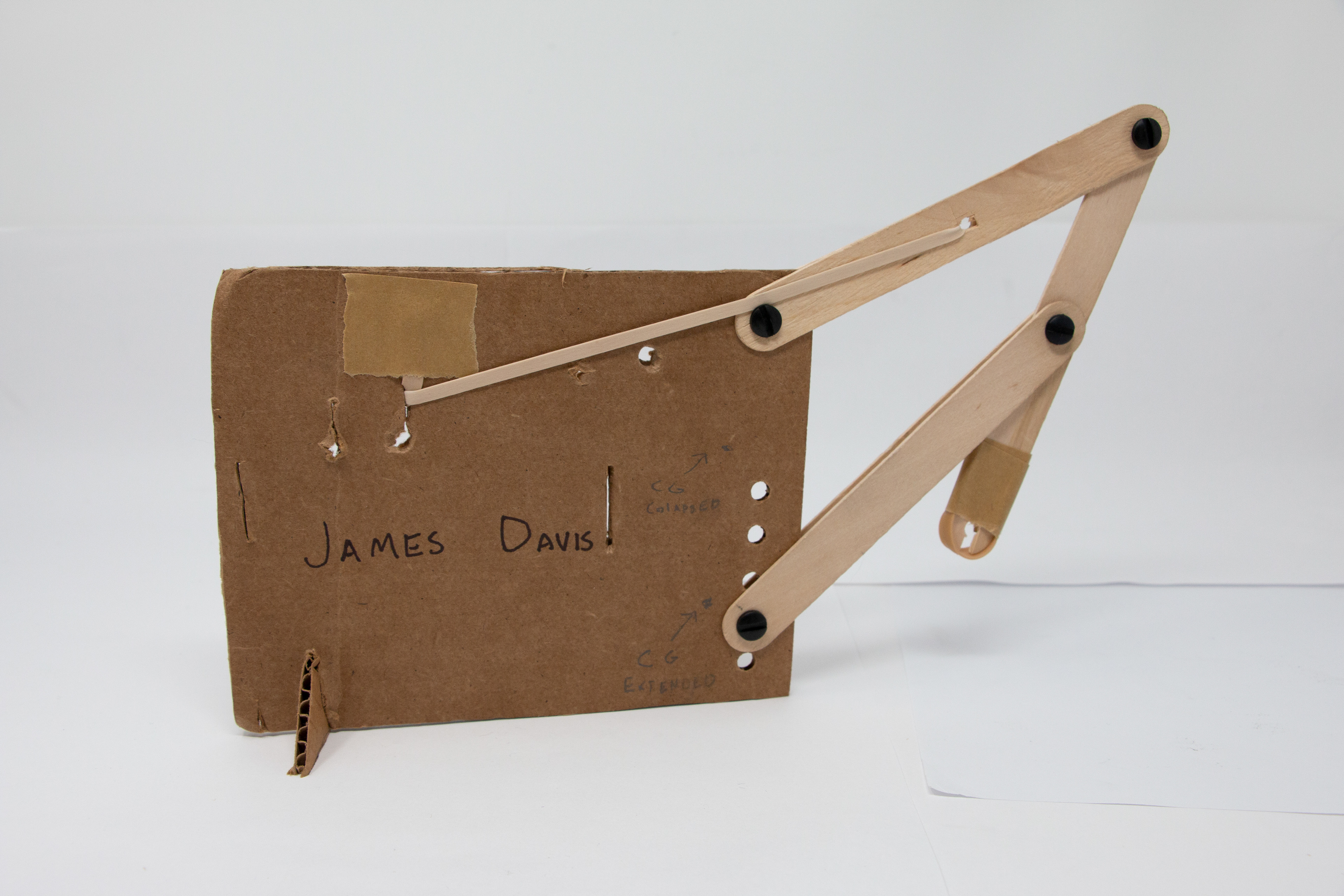



The 4 bar linkage design leapt out as the one to go with, it was already able to hop in its cardboard form. I moved to a more function version using hard board, dowels, and rubberbands.
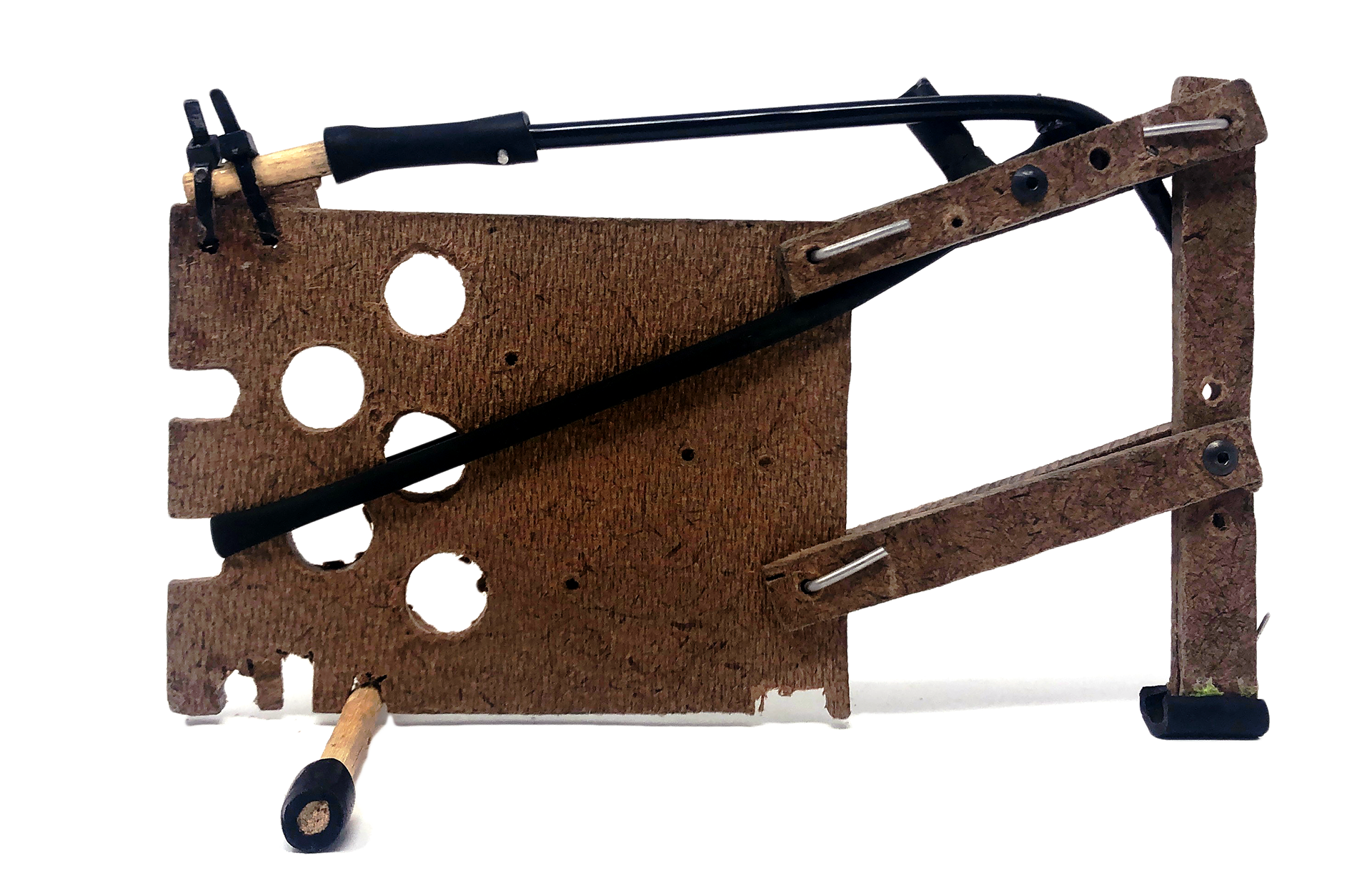
One key requirement is that the jump must take place at least one second after releasing the hopper. I used a friction delay trigger with a rubber hose fitted over a dowel. The force of the leg elastic leg is enough to pull off the rubber hose, but the friction delays release for 1-3 seconds.
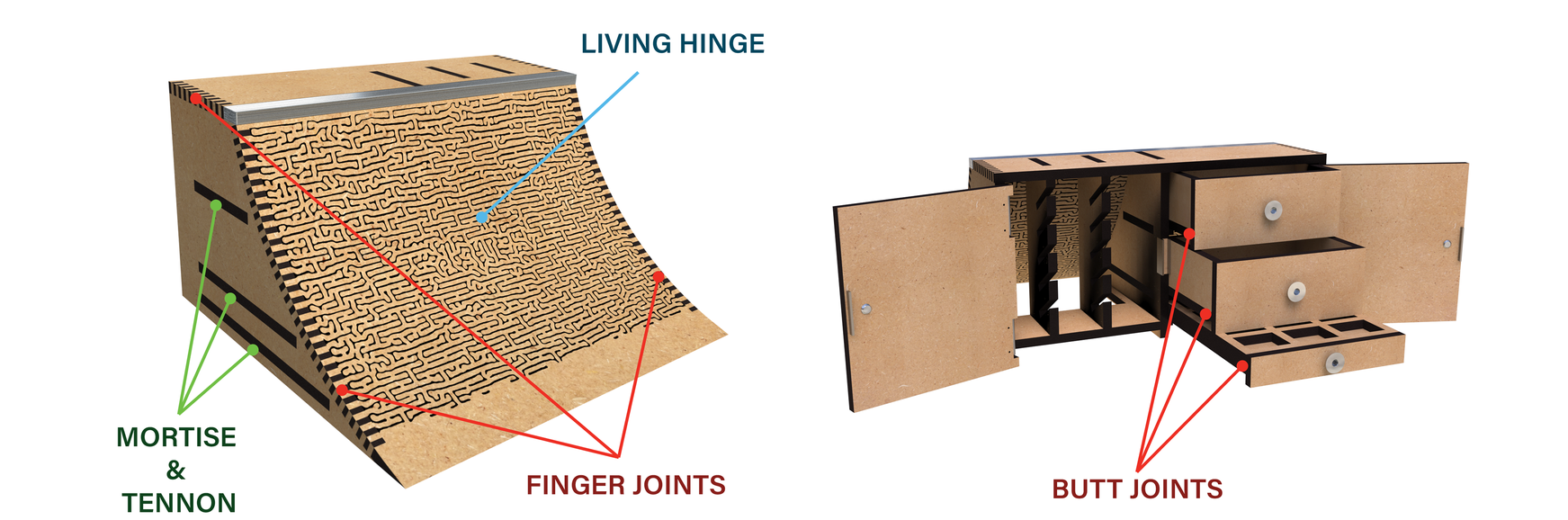
Next we fully modeled our design in CAD (Fusion360), and produced a more professional prototype using laser cut pieces

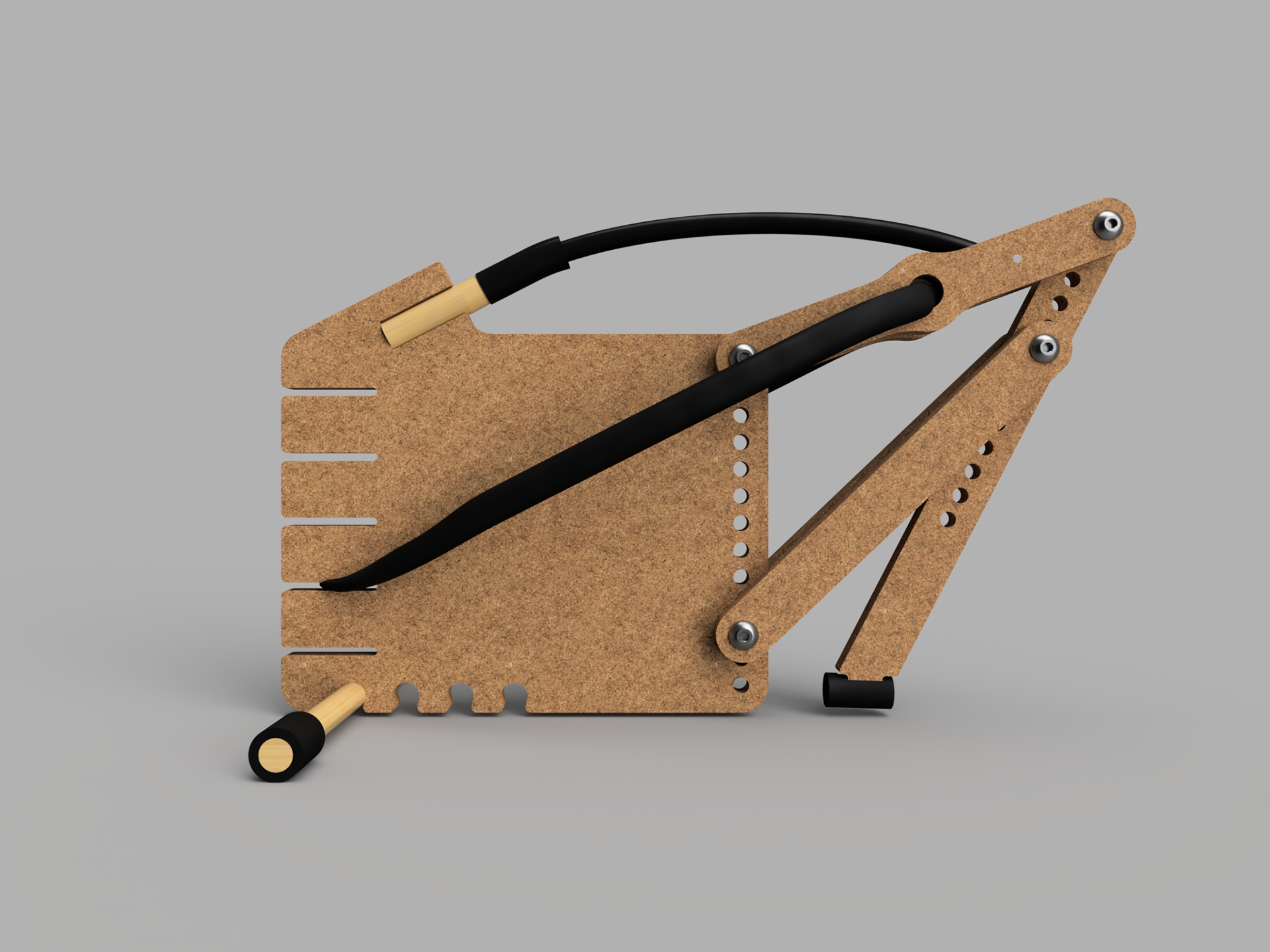

The goal of this prototype was to optimize the energy stored in the elastic band and the motion of the foot linkage.
I used the adjustment holes to find a linkage configuration that propelled the hopper forward at roughly 45 degrees to optimize distance traveled.
I used Python 3.0 in a Jupyter notebook to calculate the energy stored and the theoretical max distance for a hop. You can view the full calculation on my github.


After finding optimal lengths, I modeled and fabricated the final iteration

CAD

Prototype